目录
判断点 P 是否在三角形 ABC 之内
大家好,我是前端丁修,这篇文章给大家分享一下,如何判断点在三角形内。
为什么这个问题这么重要?
想象一下,你正在开发一个地图应用,用户点击屏幕时,你需要判断点击的位置是否落在某个区域内。这些场景都需要用到点和多边形的位置关系判断,而三角形作为最基本的多边形,是解决这类问题的基础。
几种常用的判断方法
判断点是否在三角形内,常用的有面积法、同向法、重心坐标法、射线法等四种方法。每种方法都有其特点,要根据实际情况选择最合适的方法。
1. 面积法
这个方法特别容易理解,就像小时候玩拼图一样。假设点 P 在三角形 ABC 内部,那么 P 会把三角形分成三个小三角形:PAB、PBC 和 PCA。如果 P 真的在三角形内部,这三个小三角形的面积之和就等于大三角形 ABC 的面积。

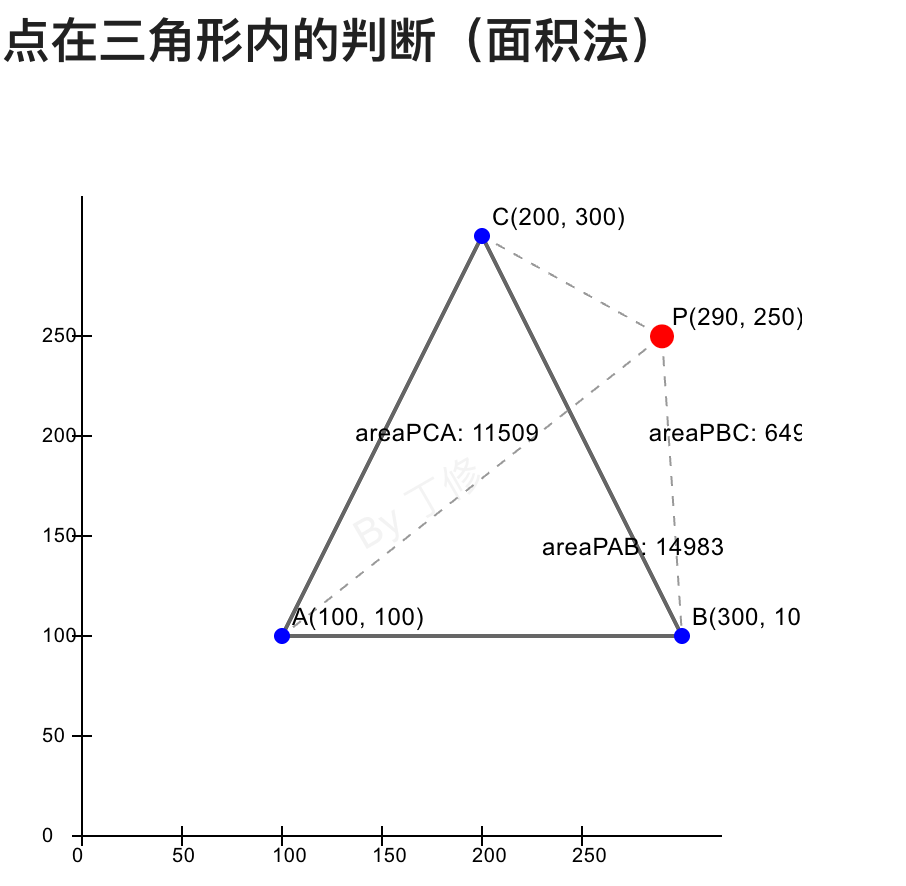
来看看具体怎么实现: 计算三角形的面积,其实有很多种方法,我们在项目中通常会存储三角形三个点的坐标,所以这里直接根据三角形坐标,使用三角形的面积行列公式计算面积。
typescriptinterface Point {
x: number;
y: number;
}
// 根据三角形的三个点坐标,计算三角形面积
function calculateTriangleArea(a: Point, b: Point, c: Point): number {
return Math.abs(
(a.x * (b.y - c.y) + b.x * (c.y - a.y) + c.x * (a.y - b.y)) / 2
);
}
typescriptfunction isPointInTriangleByArea(
p: Point,
a: Point,
b: Point,
c: Point
): boolean {
const areaABC = calculateTriangleArea(a, b, c);
const areaPAB = calculateTriangleArea(p, a, b);
const areaPBC = calculateTriangleArea(p, b, c);
const areaPCA = calculateTriangleArea(p, c, a);
return Math.abs(areaABC - (areaPAB + areaPBC + areaPCA)) < 0.001;
}
这个方法的优点是特别直观,代码也容易理解。不过计算量相对大一些,因为要计算四个三角形的面积。
2. 同向法
我们用向量叉积来判断方向,向量叉积(Cross Product)是向量运算中的一种,用于判断两个向量的相对方向。
这个方法的思路是通过向量叉积来判断点 P 相对于三角形三条边的位置。如果点 P 相对于每条边的叉积符号相同(都为正或都为负),则点 P 在三角形内部;否则,点 P 在三角形外部。
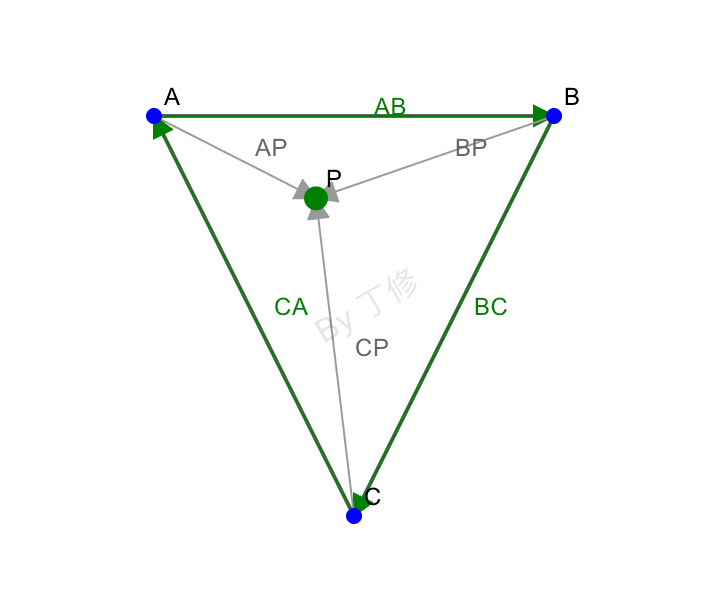

具体来说:
如果点 P 在边 AB 的左侧,则向量叉积 calcCrossProduct(a, b, p) 为正值。 如果点 P 在边 AB 的右侧,则向量叉积 calcCrossProduct(a, b, p) 为负值。 如果点 P 在边 AB 上,则向量叉积 calcCrossProduct(a, b, p) 为零。 同理,我们可以计算点 P 相对于边 BC 和边 CA 的叉积。如果点 P 相对于三条边的叉积符号相同(都为正或都为负),则点 P 在三角形内部;否则,点 P 在三角形外部。
typescript// 计算向量的叉积
function calcCrossProduct(a: Point, b: Point, p: Point): number {
// | (b.x - a.x) (p.x - a.x) | | ABx APx |
// | (b.y - a.y) (p.y - a.y) | | ABy APy |
return (b.x - a.x) * (p.y - a.y) - (b.y - a.y) * (p.x - a.x);
}
function isPointInTriangleByCrossProduct(
p: Point,
a: Point,
b: Point,
c: Point
): boolean {
const ab = calcCrossProduct(a, b, p); // AB AP
const bc = calcCrossProduct(b, c, p); // BC BP
const ca = calcCrossProduct(c, a, p); // CA CP
return (ab >= 0 && bc >= 0 && ca >= 0) || (ab <= 0 && bc <= 0 && ca <= 0);
}
这个方法的计算效率比面积法高,而且实现起来也不复杂。
3. 重心坐标法
重心坐标法是一种判断点是否在三角形内部的有效方法。它基于将点表示为三角形顶点的线性组合。通过计算点在三角形顶点的权重,我们可以确定点是否在三角形内部。具体步骤如下:
重心坐标的定义
重心坐标(Barycentric Coordinates)是一种在三角形内部表示点位置的坐标系统。对于任意一个三角形 ABC 和其中的一个点 P,重心坐标使用三个权重(λ1, λ2, λ3)来表示,这三个权重就是重心坐标。公式为:
重心坐标的推导
在同一平面内,三角形的三个顶点 ABC 中若选定一点 A 作为基点,则 B 与 C 可视为相对 A 的位移。对于该平面上任意一点 P,都可通过下式表示:
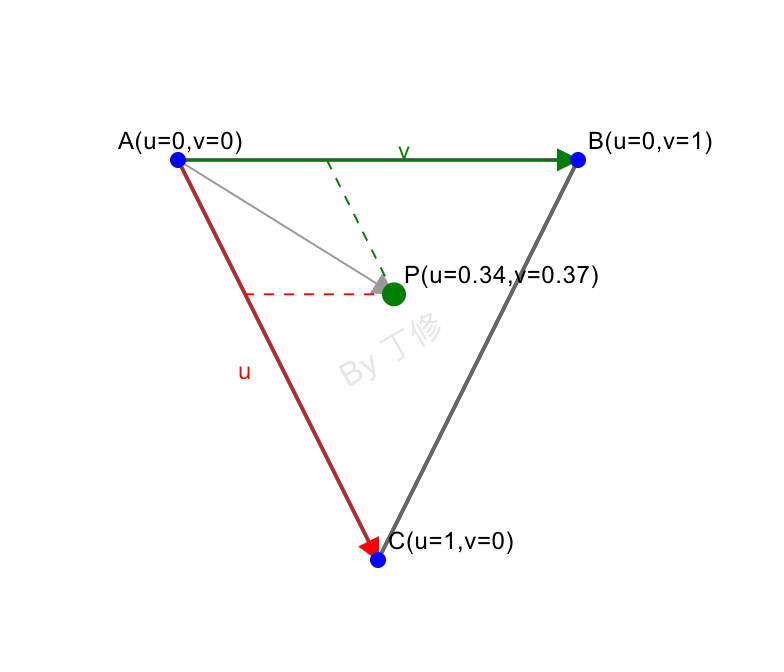
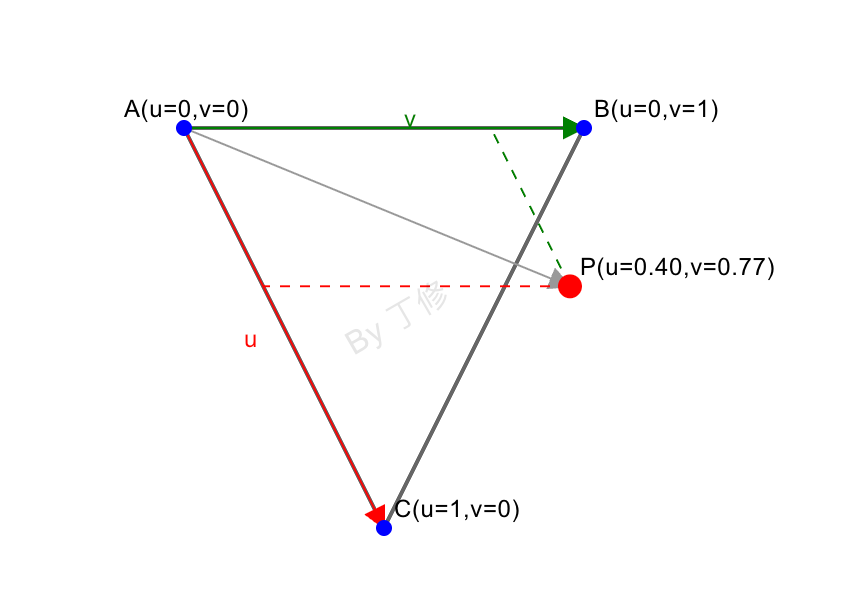
P = A + u(C – A) + v(B – A)
若将系数 u、v 取负数,即表示沿相反方向移动;若要使 P 位于三角形内部,则需满足:
u ≥ 0
v ≥ 0
u + v ≤ 1
当 u=0 且 v=0 时,P 落在点 A;当 u=0, v=1 时,P 在点 B;当 u=1, v=0 时,P 在点 C。
令 v0 = C – A(表示从点 A 到点 C 的向量)、v1 = B – A(表示从点 A 到点 B 的向量)、v2 = P – A(表示从点 A 到点 P 的向量),则有 v2 = u·v0 + v·v1。将等式两边分别与 v0、v1 做点乘,便得到:
v2 • v0 = u(v0 • v0) + v(v1 • v0)
v2 • v1 = u(v0 • v1) + v(v1 • v1)
可将这组方程视作线性方程组并使用行列式求解。
令 a = (v0•v0), b = (v1•v0), c = (v0•v1), d = (v1•v1),p = (v2•v0), q = (v2•v1)。
两式写成矩阵乘法形式:
[ a b ] [ u ] = [ p ]
[ c d ] [ v ] = [ q ]
行列式 det = ad - bc。矩阵逆为 (1/det)·[ d -b; -c a ],因此有:
u = (1/det) · ( d·p - b·q )
v = (1/det) · ( -c·p + a·q )
将 a、b、c、d、p、q 换回原始点积,即得:
u = [(v1•v1)(v2•v0) - (v1•v0)(v2•v1)] / [(v0•v0)(v1•v1) - (v0•v1)(v1•v0)]
v = [(v0•v0)(v2•v1) - (v0•v1)(v2•v0)] / [(v0•v0)(v1•v1) - (v0•v1)(v1•v0)]
代码如下
typescript// 函数接收四个参数,分别是点 p 和三角形的三个顶点 a、b、c,
function isPointInTriangle(p: Point, a: Point, b: Point, c: Point): boolean {
// 向量 AC
const v0 = { x: c.x - a.x, y: c.y - a.y };
// 向量 AB
const v1 = { x: b.x - a.x, y: b.y - a.y };
// 向量 AP
const v2 = { x: p.x - a.x, y: p.y - a.y };
// 这些点积用于计算重心坐标(barycentric coordinates),以确定点 P 是否在三角形内。
// 计算五个点积:dot00、dot01、dot02、dot11 和 dot12。
// dot00 是向量 v0 与自身的点积,表示 v0 的长度平方。
const dot00 = v0.x * v0.x + v0.y * v0.y;
// dot11 是向量 v1 与自身的点积,表示 v1 的长度平方。
const dot11 = v1.x * v1.x + v1.y * v1.y;
// dot01 是向量 v0 与 v1 的点积,表示 v0 和 v1 之间的夹角关系。
const dot01 = v0.x * v1.x + v0.y * v1.y;
// dot02 是向量 v0 与 v2 的点积,表示 v0 和 v2 之间的夹角关系。
const dot02 = v0.x * v2.x + v0.y * v2.y;
// dot12 是向量 v1 与 v2 的点积,表示 v1 和 v2 之间的夹角关系。
const dot12 = v1.x * v2.x + v1.y * v2.y;
const invDenom = 1 / (dot00 * dot11 - dot01 * dot01);
const u = (dot11 * dot02 - dot01 * dot12) * invDenom;
const v = (dot00 * dot12 - dot01 * dot02) * invDenom;
return u >= 0 && v >= 0 && u + v < 1;
}
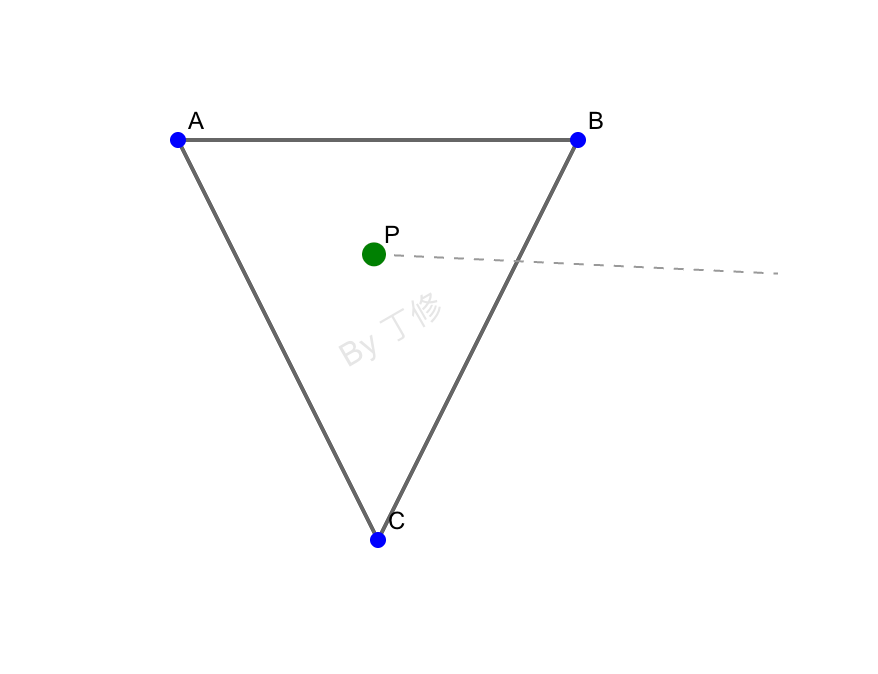
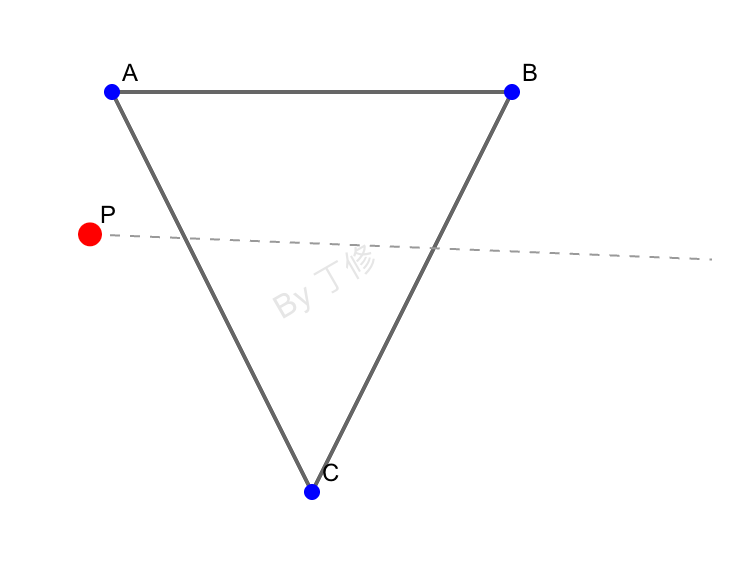
4. 射线法
从点 P 向任意方向发射一条射线,统计它和三角形边的交点个数。如果交点个数是奇数,说明点在三角形内部;如果是偶数,说明在外部。
typescript
// 判断点是否在三角形内的射线法实现
// 计算叉积
export function crossProduct(a: Point, b: Point, c: Point): number {
return (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x);
}
// 判断线段是否相交
function isIntersect(
p1: Point, p2: Point, // 第一条线段的端点
p3: Point, p4: Point // 第二条线段的端点
): boolean {
// 完全不相交
if (Math.max(p1.x, p2.x) < Math.min(p3.x, p4.x) ||
Math.max(p3.x, p4.x) < Math.min(p1.x, p2.x) ||
Math.max(p1.y, p2.y) < Math.min(p3.y, p4.y) ||
Math.max(p3.y, p4.y) < Math.min(p1.y, p2.y)) {
return false;
}
// 跨立实验
const cross1 = crossProduct(p1, p2, p3) * crossProduct(p1, p2, p4);
const cross2 = crossProduct(p3, p4, p1) * crossProduct(p3, p4, p2);
return cross1 <= 0 && cross2 <= 0;
}
// 使用射线法判断点是否在三角形内
export function isPointInTriangleByRay(
p: Point,
triangle: Triangle
): {
isInside: boolean;
intersections: {
ab: boolean;
bc: boolean;
ca: boolean;
};
} {
const { a, b, c } = triangle;
// 创建一条向右的射线
const ray = {
x: p.x + 1000, // 足够长的射线
y: p.y
};
// 检查与三条边的相交情况
const intersectAB = isIntersect(p, ray, a, b);
const intersectBC = isIntersect(p, ray, b, c);
const intersectCA = isIntersect(p, ray, c, a);
// 统计交点个数
const intersectCount = (intersectAB ? 1 : 0) +
(intersectBC ? 1 : 0) +
(intersectCA ? 1 : 0);
return {
isInside: intersectCount % 2 === 1,
intersections: {
ab: intersectAB,
bc: intersectBC,
ca: intersectCA
}
};
}
实际应用中的注意事项
在实际使用这些方法时,有几点需要特别注意:
- 浮点数精度问题:由于计算机浮点数的精度限制,判断相等时要留有一定的误差范围。
- 边界情况:点在三角形边上或顶点上时的处理要特别小心。
- 性能考虑:在需要大量计算的场景下,建议使用同向法或重心坐标法。
希望这篇文章对大家有帮助!
本文作者:丁修
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!